
Robotics Is a System of Systems
In robotics, the hardest problems are rarely isolated to motion planning or control algorithms. They emerge from everything around them: simulators, robot programs, perception pipelines, hardware drivers, dashboards, and logging tools. A real robotics system is never just “a robot.” It is an ecosystem of programs that must cooperate in real time.
Robotics has evolved into a distributed discipline. For example, a typical system can have a simulation running in one environment, control logic in another and visualization tools and analytics layers on top. Each component may be excellent on its own, but when combined, the problems start to show. Integration becomes its own engineering effort.
Many platforms respond to this complexity by narrowing the system: define a closed environment, optimize within it, and discourage stepping outside. That approach can feel efficient at first, but robotics doesn’t live in isolation. New simulators appear, hardware changes and control strategies evolve. A system that cannot adapt to that diversity quickly becomes a constraint.
Interoperation, then, is not a secondary concern. It is the central design challenge.
That is the perspective behind the AICA System. The aim is not to replace the surrounding ecosystem, but to coexist within it. Instead of forcing tools inward, it connects through shared standards.
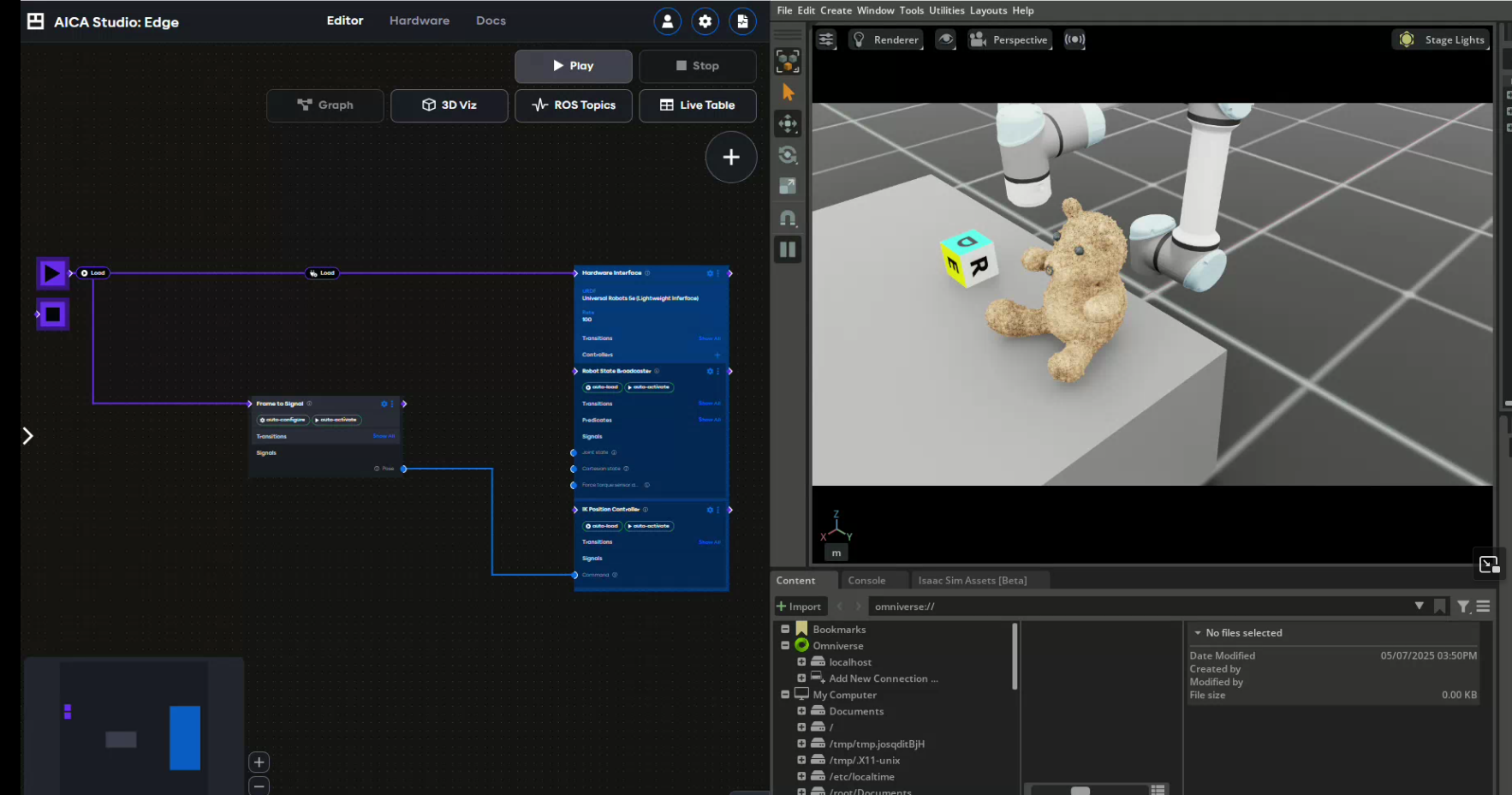
The integration between AICA Studio and Isaac Sim illustrates this idea clearly. The simulator and the application communicate through standard ROS 2 interfaces, exchanging commands and state information in a bidirectional loop. From the application’s perspective, the simulated robot behaves like real hardware. The connection relies on a clean hardware abstraction and open communication contracts rather than a proprietary bridge. The simulator remains an independent system, connected through shared standards instead of being absorbed into a closed runtime.
Open standards, particularly ROS 2, make this possible. They provide a shared language for communication: topics, message types, timing, and structure. When systems agree on that language, they can evolve independently while remaining interoperable.
Yet interoperability alone does not solve the full problem.
Once multiple tools are connected through ROS 2, the robotics system becomes distributed by definition. Distributed systems introduce a new challenge: visibility. Topics may publish at the wrong rate, nodes might fail, and simulated dynamics may diverge from physical behavior. Without clear insight into the data flowing through the system, diagnosing these issues becomes guesswork.
This is where data visualization becomes a structural component rather than a convenience.
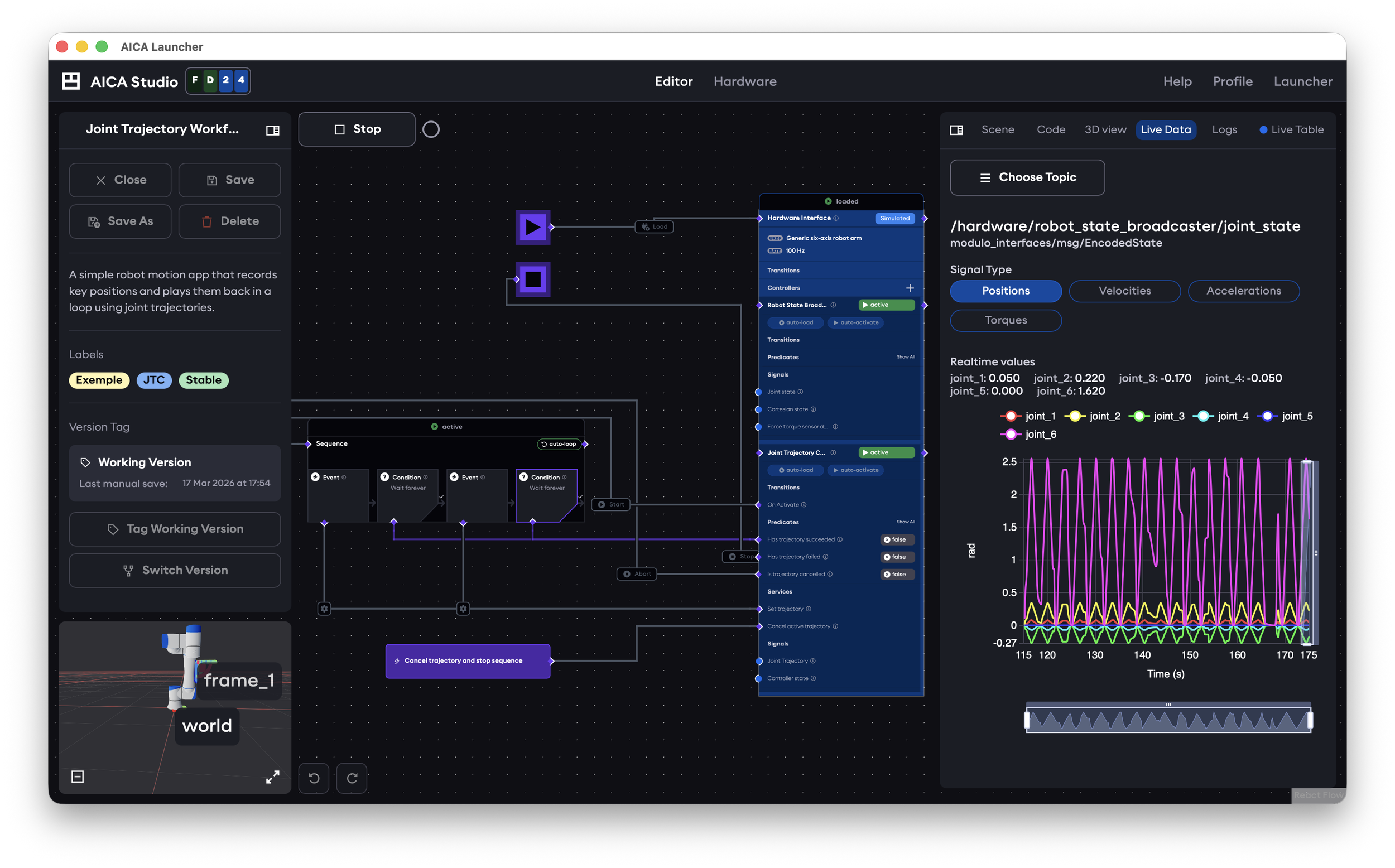
In AICA Studio, live topic visualization exposes ROS 2 data directly within the application environment. Signals can be observed as they evolve, and interactions between application logic and hardware or simulation become tangible. The same openness that allows systems to connect also makes them inspectable using various tools.
Robotics will continue to diversify in hardware, simulation environments, and software architectures. The platforms that endure will not be the ones that enclose the ecosystem, but the ones that integrate with it naturally.
Interoperation is not an integration detail, it is a design philosophy aligned with how robotics actually works: distributed, evolving, and modular.
Systems built with that assumption remain adaptable long after individual tools change.
Written by Yehya El-Hassan
Machine Learning Engineer